














ELEKTRONICZNE MAPY DLA WODNIAKÓW
ZOBACZ
W tym odcinku zajmiemy się teoretyczną stroną łuków ryb na wyświetlaczu echosondy. Jak powstają i dlaczego właściwie mają tak specyficzny kształt. Drugi temat to porównanie czujników echosond: dlaczego identyczne transduktory mogą mieć różne kąty stożka i co z tego wynika w praktyce.
15 lat temu, gdy zaczynałem swoją przygodę z echosondą marzyły mi się grube łuki ryb, zwiastujące olbrzymie szczupaki, okonie i sandacze. W folderach reklamujących ówczesne echosondy takie obrazy oferowały modele, które niestety były poza moim zasięgiem finansowym. Potem była pierwsza echosonda i bardzo szybko przekonałem się, że urządzenie, które kupiliśmy wspólnie z przyjacielem nie jest w stanie pokazać łuków. (Teraz wiem, że tak naprawdę nasza wiedza o obrazach sonarowych była niewystarczająca). Dopiero kilka lat później na ekranie nowego echa - zupełnie bez trudu - zaczęliśmy dostrzegać upragnione łuczki.
No właśnie: dlaczego echa przybierają takie właśnie kształty. Postaram się to wyjaśnić na rysunku poniżej.

Rysunek pokazuje łódkę z echosondą na pokładzie. Łódź porusza się od prawej do lewej. Sonar wysyła wiązkę sygnału, która odbija się od ryby i wraca do przetwornika. Na rysunku pokazane są trzy najważniejsze położenia stożka i ryby. W rzeczywistości ultradźwiękowych pingów na odcinku między punktem 1 i 2 może być nawet kilkanaście.
Jak już wiemy z poprzednich odcinków tego cyklu (patrz: "Pierwsza echosonda") echosonda pokazuje na ekranie odległość od przetwornika do obiektu w wodzie. Kiedy wiązka zbliża się do ryby i zaczyna się z nią stykać sygnał zwrotny jest jeszcze bardzo słaby (stożek A). Dlatego początek łuku jest reprezentowany tylko przez wąski łuk, składający się z kilku pikseli. W miarę zbliżania się do ryby sygnał odbity powraca z coraz to mniejszej odległości i jest coraz mocniejszy. W momencie, kiedy łódka przepływa bezpośrednio nad rybą odległość do niej jest najmniejsza i jednocześnie sygnał od niej odbity jest najmocniejszy - to dlatego środek łuku jest najszerszy (stożek B). Teraz następuje faza odpływania od ryby i łuk ponownie robi się coraz cieńszy (stożek C). Jak zauważyliście na skutek zmian w odległości ryby od przetwornika tworzy się charakterystyczny łuk. O wielkości ryby świadczy nie jego długość, ale grubość, która jest bezpośrednio związana z siłą odbitego sygnału, a przez to z wielkością ryby.
To, co jest pokazane na rysunku to sytuacja teoretyczna. W rzeczywistości bardzo często nie najedziemy na rybę centralnie. W związku z tym może się wydawać, że jest ona mniejsza niż w rzeczywistości. Pamiętajmy o tym, jeśli mamy wątpliwości powinniśmy zrobić kilka napłynięć, aby dobrze spenetrować potencjalne łowisko.
Jak mierzy się kąt stożka sygnału przetwornika?
Stożek sygnału nie jest dosłownie stożkiem - to tylko pewne umowne pojecie. W rzeczywistości wygląda on jak na rysunku poniżej.
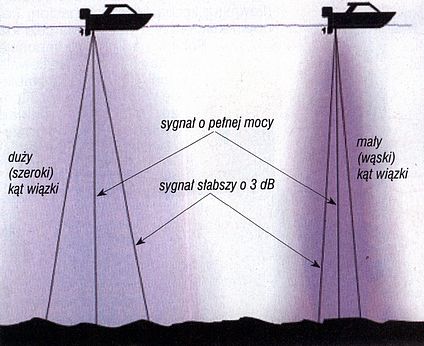
Stożki sygnałów o różnych kątach.
Większość producentów mierzy tę wartość w następujący sposób.
Bada siłę sygnału w centrum, a następnie odsuwając miernik coraz dalej od środka znajduje miejsce, gdzie sygnał jest o -3 dB słabszy niż w środku. W ludzkim języku jest to miejsce, gdzie moc sygnału słabnie o 50%. Na tej podstawie oblicza kąt stożka.
Są jednak producenci, którzy jako odniesienie przyjmują -10 dB (spadek mocy sygnału o 90%). To taki komercyjny zabieg - wędkarzom wydaje się, że im szerszy stożek, tym lepiej obserwuje się podwodną rzeczywistość - niestety nie zawsze tak bywa.
Stosowanie różnych norm powoduje sytuację, w której taki sam czujnik może mieć trzy razy większy kąt stożka sygnału. Tak więc metoda pomiaru może mieć podstawowe znaczenie przy wartościach podanego kąta. Eagle i Lowrance stosują pomiar oparty na standardzie -3 dB, ale stosują też pojęcie stożka efektywnego ( norma -10 dB). W Humminbirdzie. jest to standardowo norma -10 dB.
Szeroki i wąski kąt w praktyce.
Czujnik echosondy pełni podwójną rolę. W momencie wysyłania sygnału jest głośnikiem, potem zamienia się w czuły mikrofon, odbierający odbite sygnały.
Jak wiadomo mikrofony mają rożną charakterystykę. Są takie, którymi można zarejestrować dźwięki z dużej odległości, ale trzeba je bardzo dokładnie nakierować na źródło dźwięku oraz takie, które zbierają wszystkie dźwięki dookoła.
Wyobraźmy sobie sytuację, kiedy w zatłoczonym pokoju chcemy nagrać rozmowę z jedną osobą. Mając zwykły mikrofon zarejestrujemy cały zgiełk tłumu, dysponując mikrofonem o właściwej charakterystyce nagramy tylko to, na czym nam zależy. Jak to przełożyć na podwodne realia?
Szeroki kąt stożka sygnału (np. 90 stopni) powinien teoretycznie pozwolić na wykrycie ryb w większej objętości toni wodnej i tak jest w rzeczywistości. Należy tylko pamiętać, że łącznie z sygnałem dna i ryb, dostajemy również echa odbite od wszystkiego, co się w wodzi znajduje: planktonu, roślinności, itd. Jeśli jest tego dużo, to echosonda zacznie nam wariować i obraz zrobi się mało klarowny.
Miałem takie sytuacje nawet ze standardowym 20 stopniowym czujnikiem, kiedy pływaliśmy nad zbitą ławicą płoci, przemieszczającą się na kilku metrach pod powierzchnią. Echosonda zaczęła pokazywać 4 metry do dna, gdy tymczasem staliśmy na dobrych 10 m. Sygnał nie był w stanie przebić się przez ryby i dotrzeć do gruntu.
Ciekawe różnice występują w sposobie obrazowania dna przez przetworniki szerokokątne i wąskokątne. Rysunek poniżej pokazuje, że zdecydowanie dokładniej pokazuje topografię dna przetwornik wąsokątny .Szeroki kąt przetwornika powoduje nieuchronne spłaszczenie obrazu, ale za to rzeczywiście ułatwia poszukiwanie ławic ryb w toni wodnej.

Porównanie obrazów dna z czujnika szeroko- i wąskokątnego.
Tekst ukazał się w numerze 08/2005 "Wędkarskiego Świata".
e-sonar
ul. Jarząbka 15
05-500 Piaseczno
pn-pt 9:00-18:00
sob 9:00-12:00
